KIMA - KInematic Mechanism Analysis ver. 2.5 - 05/09/2004
|
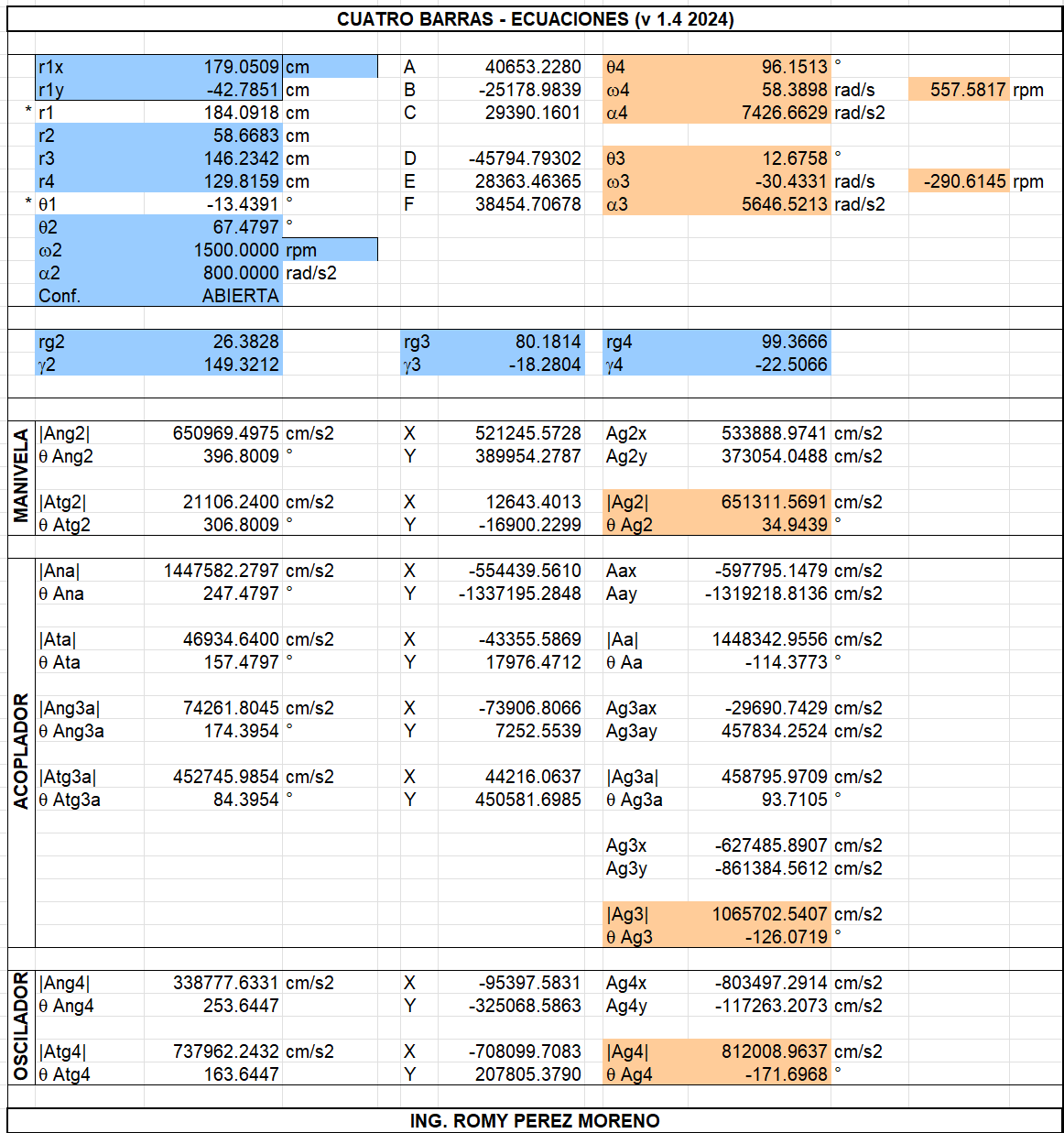
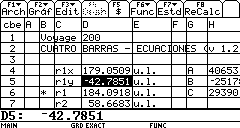
The code here can be used to solve basic loops of four links mechanism. The program 4B is for a four bar mechanism, the MC program is for a slider-crank mechanism. Now, in version 2.0 is also included the code for the analisys for an inversion of a slider-crank (MCI program). Version 2.5 now accepts three command line parameters to give this programs file access and quiet operation. Actual use is: 4B-2_5.exe [-i data.txt] [-o output.txt] [-q] -i especifies the filename that contains the data for the problem. It must be an ASCII text file with one data per line. The data that must be found here is the same that the program asks for by keyboard. -o tells the program where to write the results of the calculations. If the file does not exists, it creates. If it does exists, it is erased and overwritten. The results for each theta 2 are written side by side on a single line, sperated by one space. This makes it easy for MatLab or Excel to retrive this data and plot it. -q tells the program to skip the last question in the Results screen. You can use the option (along with the other two) to make some iterations from MatLab or any other program. File names for data.txt and output.txt must be in 8.3 format. Any or both parameters (-i|-o) can be used at the same time. The details for the data format should be included briefly in a manual posted here. This three command line parameters applie for all the KIMA suite. Outputs: • Position analysis • Velocity analysis • Acceleration analisys Points of interest: • Rotating joints • Gravity centers for each link |
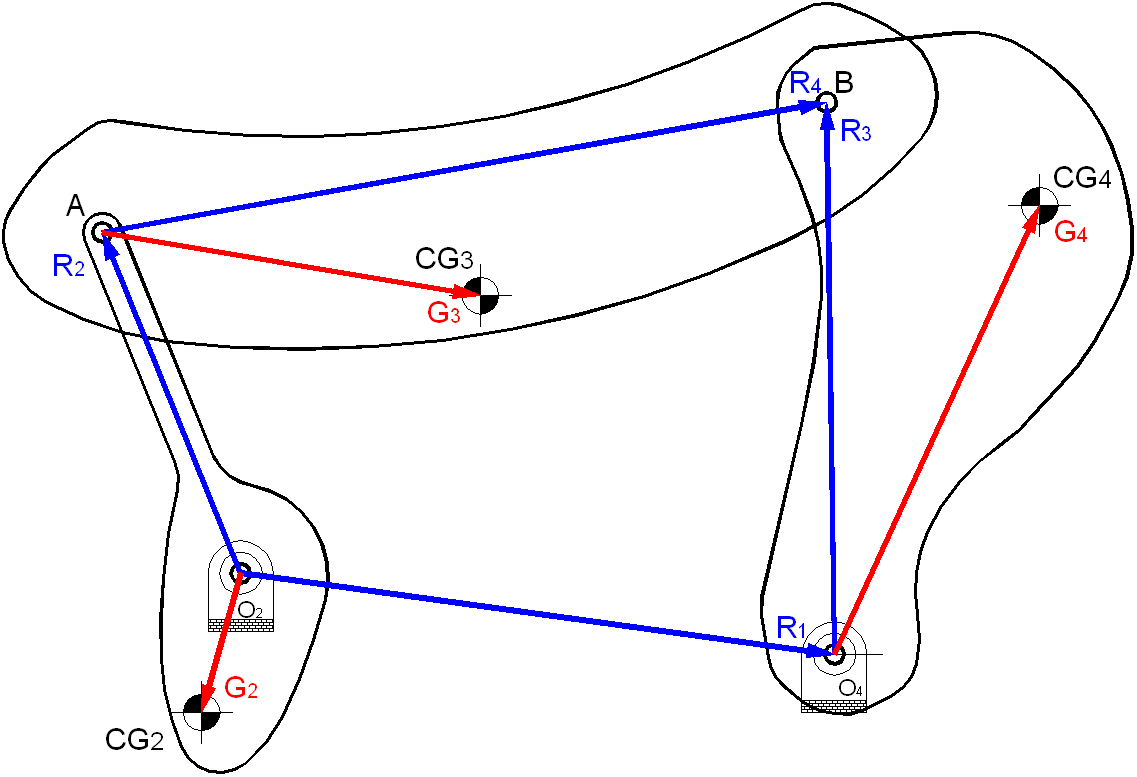
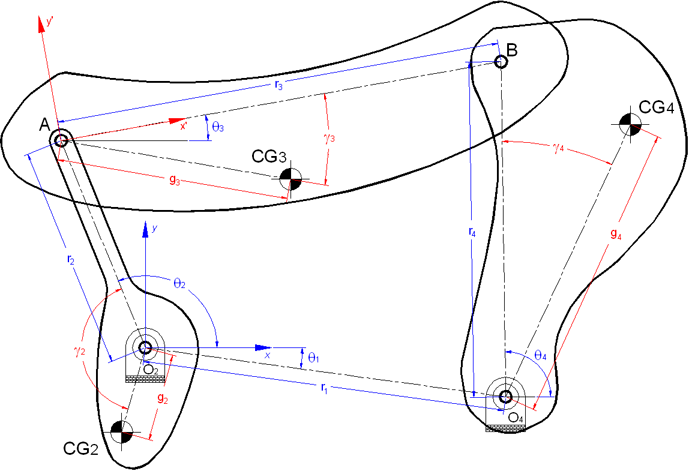
Four bar problemThe next figure shows the data that is used to solve the problem. As you can see, the angles named "theta" must be measured from a horizontal line to the center line between opposite joints of the same link. "Beta" angles are measured from this center line to a line runnig from the "static" joint to the gravity center for each link. You can calculate data for up to one point for each link, wether it is the GC or not, apart from the data calculated at the joints. |
|
|
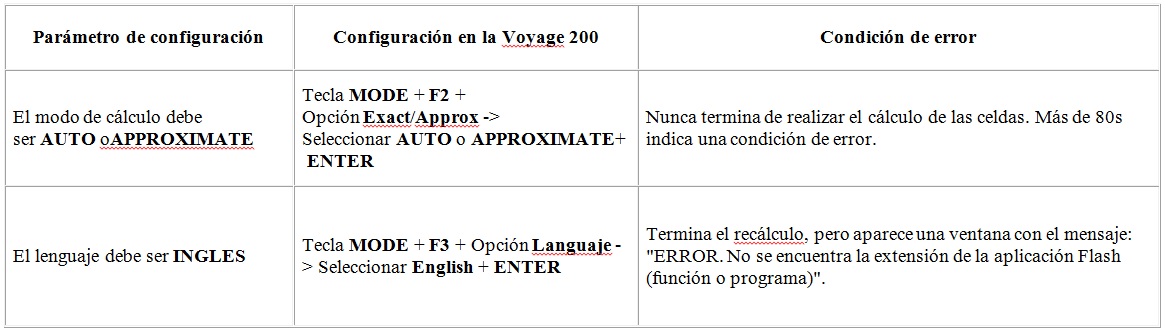
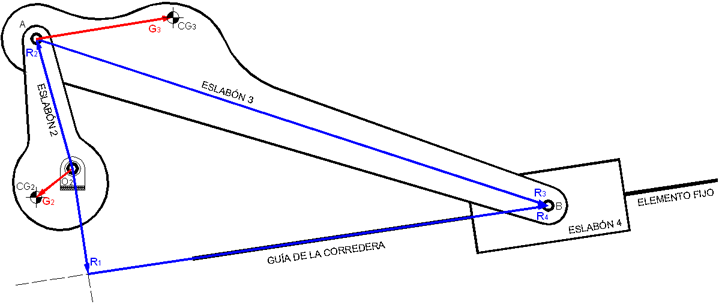
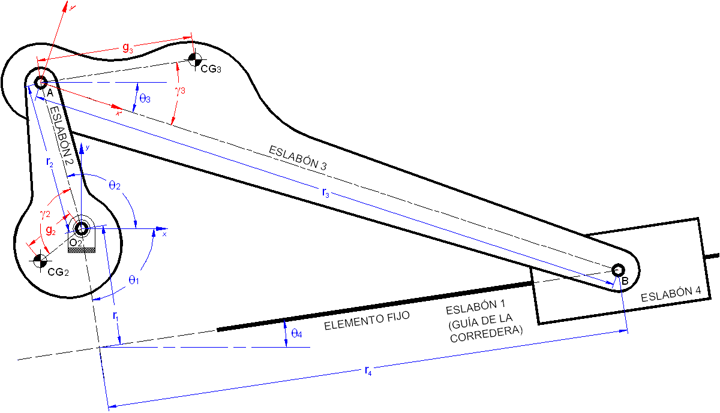
It is very importan the sign for the angular values, every thing measured counter clockwise must be assigned a plus sign and a negative sign otherwise. The angular velocity can be typed in rad/s or rpm, the default is rad/s and if you want rpm then write the angular velocity followed by the string "rpm" without spaces in between. Example: 600 rpm clockwise must be typed -600rpm when asked by the program. The angular acceleration must be expressed in rad/s^2. The angular position must be in degrees (0-360), this will be fixed in a later version to allow radians. The program will not check the linear units, so you can use any linear units, as long as all your linear data is expressed in the same scale and unit of mesument. If you does not specify a radial distance for the gravity center of any link, then it will be assumed that it is not of your interest and neither you will be asked for the angular distance nor any reference to this gravity center will be made in the results screen. This works for each link. The linear results are expressed unitless, so you must assign the unit used at the first time. Linear velocities are linear_units/s and linear accelerations in linear_units/s^2. The angular position is given in grades (0-360), angular velocity in rad/s and angular accelerations in rad/s^2 (radians per square second). WIN/DOS: 4B-2_5.exe Updated on 12/may/2004 Slider-crank problemThe diagram for this problem must be similar to that of the 4 bar mechanism, where the fourth bar has a length of zero. The program asks the slider offset and angular position. The offset is the perpendicular distance from the line which defines the slider path and the crank's fixed joint. This distance is positive if the slider's path is UNDER the crank's fixed joint, negative otherwise. The slider angular position is the angule from a horizontal line to the slider's path. |
|
|
The gravity centers for the cranck and coupler are defined the same as previously done. It is the same for angular and linear position, velocity and acceleration. WIN/DOS: MC-2_5.exe Updated on 12/may/2004 Inverted Slider-crank problemFor now, only the code is available. ASAP will be posted the rest of the information. Any way, the use is the same as for the previous two programs. |
| WIN/DOS: MCI_I-2_5.exe, MCI_II-2_5.exe , MCI_III-2_5.exe Updated on 12/may/2004 |